
易家知识网(易家电子)ejdz.cn
COPYRIGHT © 2023
渝ICP备20008086号-17
 渝公网安备50010702505138号
渝公网安备50010702505138号
12 月 4 日中科院研发消息,据中国科学院沈阳自动化研究所消息,该所微纳米课题组开展了创新性研究,利用模板辅助法研发出多刺激响应超疏水微型机器人。
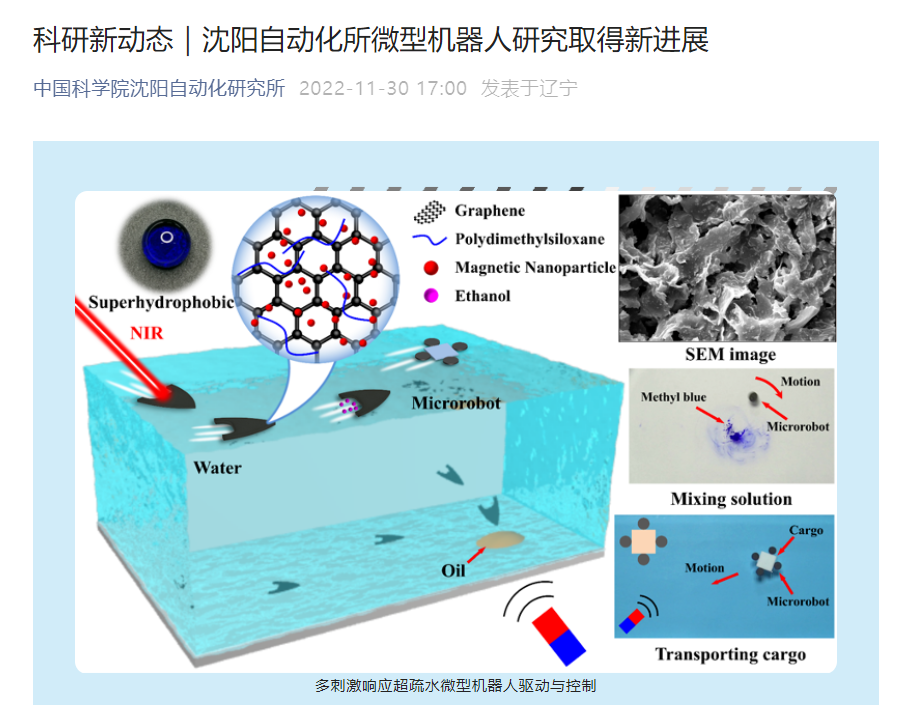
据介绍,该微型机器人内部具有感知红外光和磁场的单元,可以储存化学试剂,使得它可以在光场、磁场等(即多场驱动)的控制下在水面快速游动。
科研人员对微型机器人的稳定性和环境适应性进行了评估,结果表明,机器人在水面上可以实现预编程的轨迹运动,尤其是在化学试剂的作用和磁场的驱动下实现了不同轨迹的运动。科研人员进一步探索了在多场驱动下,实现多个机器人运动控制的可能性。
结果表明,在光场和磁场作用下,多个机器人实现了协同配合操作,可以夹取大于自身尺寸较多的结构块。随着制备工艺的提升,微型机器人的尺寸有望进一步缩小,在细胞操作,生物组织构建等领域具有应用前景。
暂无评论,期待你的妙语连珠
易家知识网(易家电子)ejdz.cn
COPYRIGHT © 2023
渝ICP备20008086号-17
渝公网安备50010702505138号
已收到!
我们将尽快处理。